
两者之间的区别可以理解为:PID控制是基于时间的,而模糊控制是基于过程的。两者之间的结构差异如图2所示。
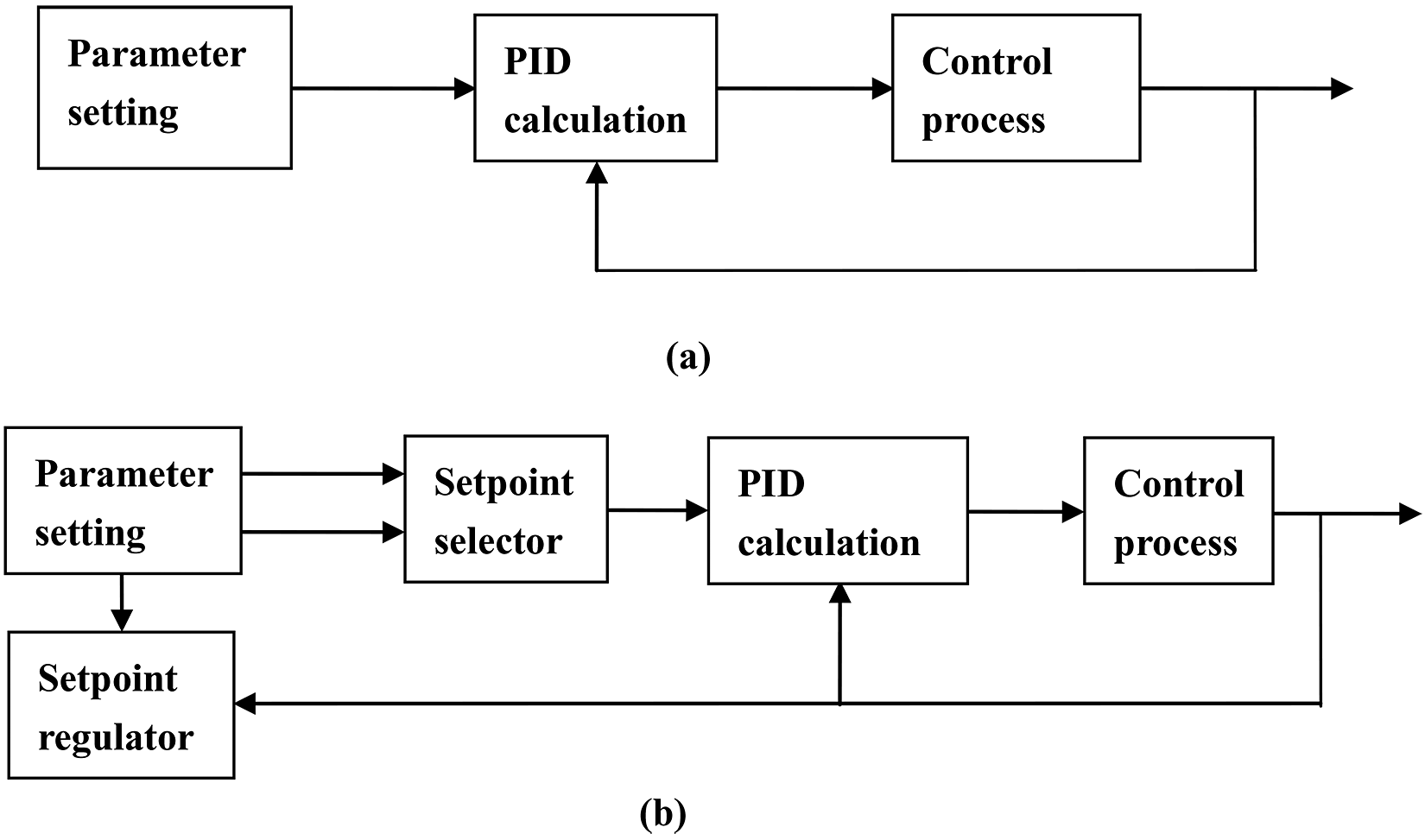
与传统PID控制器相比,模糊控制器的智能体现在额外的设定点调节器和设定点选择器中。设定值调节器模拟有经验的操作员的控制程序和功能。它侧重于控制过程(在PID控制范围内)、系统的动态特性和非线性(包括负载变化)。通过将假设的目标值输入PID操作器来操作系统。由于模糊控制显著降低了超调量,因此能够有效提高系统响应速度和温度控制精度,更容易实现计算机控制。因此,模糊控制技术被许多控制系统所采用。关于热处理设备的控制,模糊控制技术标志着过去十年中最重要的进展,越来越受到热处理行业的重视。模糊PID控制存在于一系列控制应用中,包括电阻炉温度系统、原料混合系统、啤酒发酵监控系统、风网风门控制系统、磁悬浮系统、电机控制系统、水泥冷却过程控制、空调恒压供水系统、雷达导引头伺服系统等等。这足以说明模糊PID控制算法的优越性。
4软件设计
根据系统设计要求,软件程序流程如图3所示。
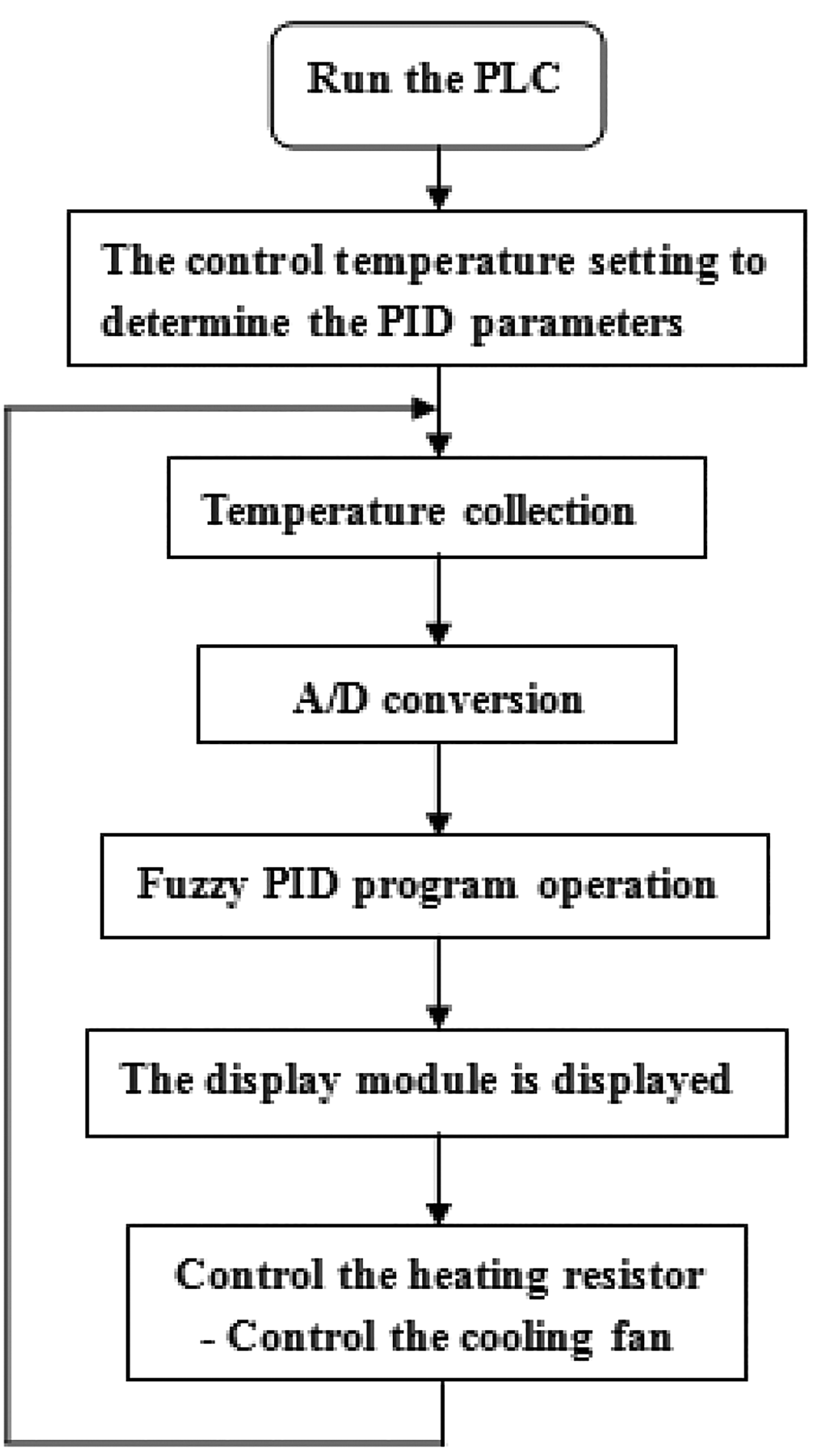
首先,对温度控制系统的参数进行唤醒初始化,主要设置控制温度和PID初始值,包括PID增益、PID积分时间、PID微分时间和PID采样时间的值设置。然后,通过传感器采集6,400 ~ 320,000范围内的环境温度作为数字信号。由于模糊PID算法需要实际格式的温度信号输入,因此在PID算法过程之前需要对温度信号进行A/D转换。采集的数字信号被转换为双整数信号,然后再转换为实数。实际温度由温度计算公式计算得出。测得的温度作为PID操作的输入信号,输出可用于控制加热电阻和冷空气风扇。
在设计中,温度控制基于PID控制算法。PID是工业生产中最常用的算法——一种能够满足高精度测量和控制系统需求的控制方法。利用PID算法实现的温度控制系统可以更加稳定可靠【5】。
5实验和模拟
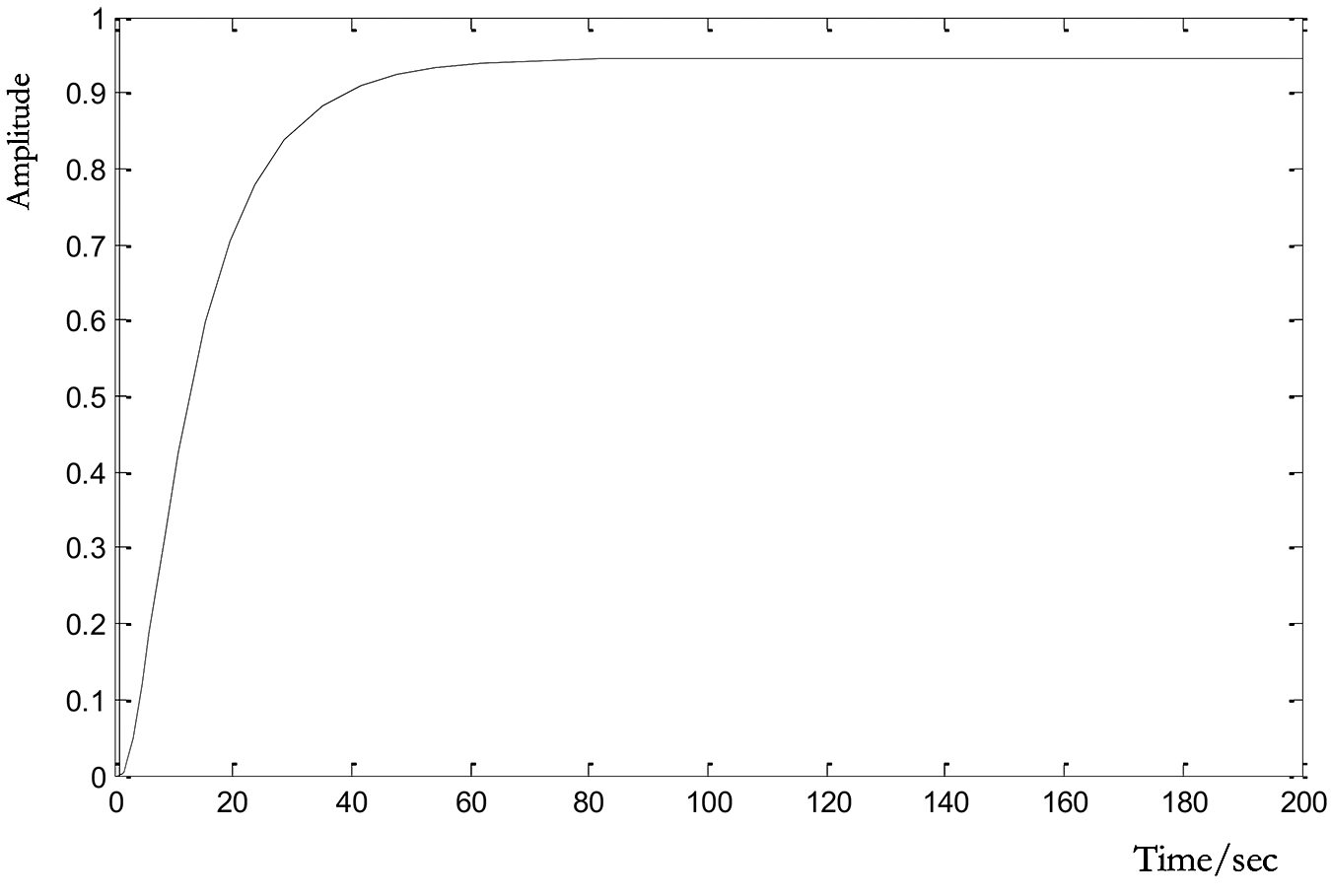
假设系统具有开环传递函数G(S)= 1/S(2 * S+5),并在Matlab中建立模糊控制系统,如图4所示。此时,放大器增益= -1,000,增益1 = 0.05,增益2 = 0.01。选择被控对象及其参考模型,我们可以得到如图5所示的仿真曲线。

6个结论
在这项工作中,温度控制系统可用于实时显示箱内的温度。通过设定风扇和加热板的温度,引入PID控制算法来控制箱体的温度,达到温度控制的需要。使用西门子PLC200作为控制器,系统控制具有很高的精度、稳定性和可靠性,并且不易受外界干扰。现场调试表明,系统可以成功控制箱体温度。这项工作有望带来良好的应用前景。