本教程将帮助您了解步进机和伺服之间的区别电机,以及如何为您的应用选择最佳电机。我们将介绍电机基础知识,包括结构、电流、功能和特性、选择电机时要问的问题、应用示例、关键术语等。我们还提供了更多资源以获取更多信息。
运动基础:如何跳舞者汽车工厂
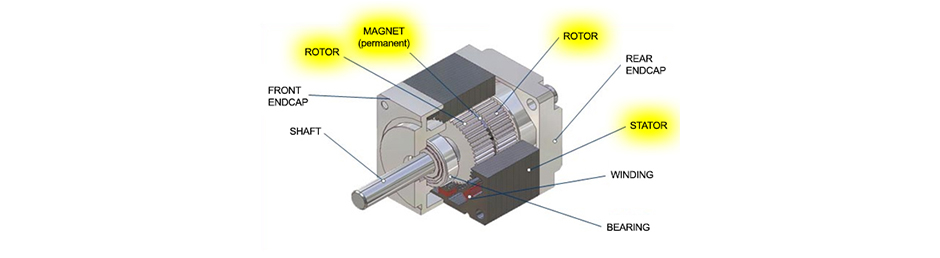
步进电机结构
大多数工业步进电机是混合式步进电机,由永磁转子和绕线电磁定子组成。
步进电机电流
DC电流用于激励步进电机的磁性线圈。
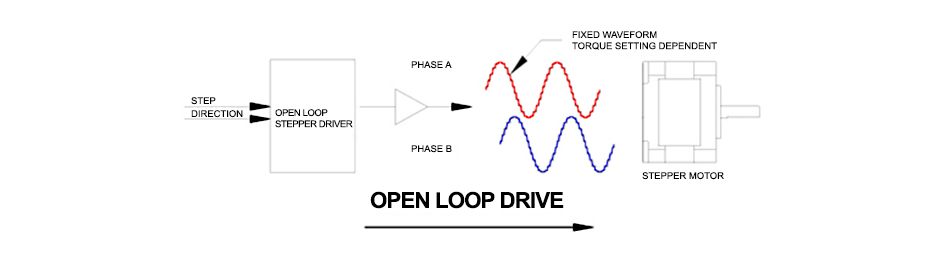
驱动器提供的电流产生磁场,用于旋转电机轴。下面是这个过程如何工作的基本表示。
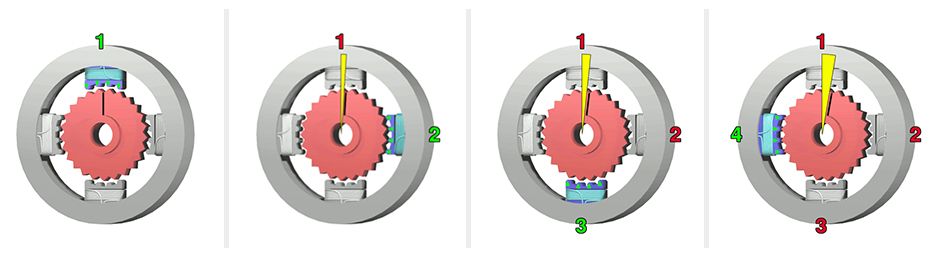
1.上部电磁体被激活,中央齿轮的齿相应地排列起来。
2.上电磁铁被关闭,右电磁铁打开。最近的齿轮齿然后跳起来与此对齐。这会产生一个阶梯(例如1.8圈)。
3.右边的电磁铁被关闭,下面的电磁铁被打开。然后嵌齿跳起来与底部电磁铁对齐。这导致了另一个步骤。
4.底部电磁铁被关闭,最左边的电磁铁打开。齿轮齿然后跳起来与此对齐。这导致了另一个步骤。在步进角为1.8的电机上,旋转一周需要200步。
其他需要知道的事情
1.微步增加步数/圈数。
2.增加电流会增加电机扭矩。
3.步进频率越高,电机速度越高。
4.随着电机速度的增加,反电动势会降低电机扭矩。
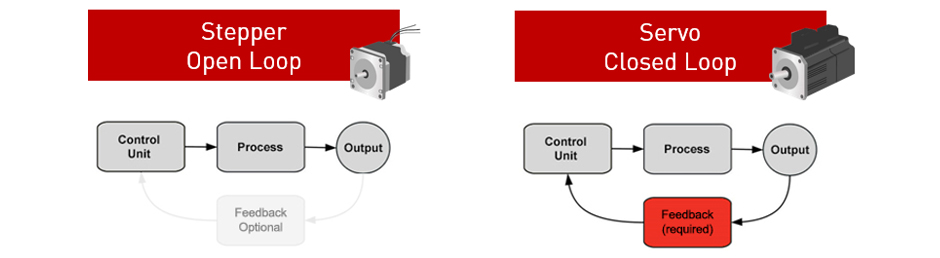
5.不需要位置反馈,但这是可选的。
STEPPER基础知识总结
DC电流产生磁场。这是一个开环恒流系统。电机静止时电流保持不变。
![]() 优势
优势
简单的设计/控制
不需要反馈
出色的低速扭矩
出色的低速平顺性
更低的整体系统成本
![]() 不足之处
不足之处
扭矩随着速度的增加而降低
恒定电流,与要求无关
无法对负载变化做出反应
有趣的踏步机事实
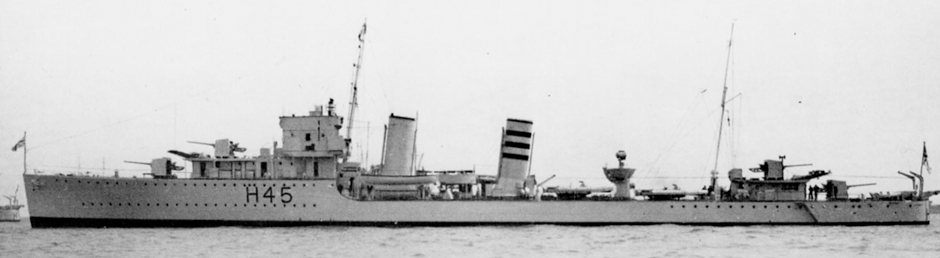
1920年,步进电机的实际应用开始了,因此被称为VR(可变磁阻)型步进电机,被英国海军用作定位控制和远程控制。
运动基础:如何伺服系统汽车工厂
伺服电机结构
交流伺服系统由一个三相定子和一个永磁转子组成。此外,适当的电流控制还需要旋变器或编码器等电机反馈。
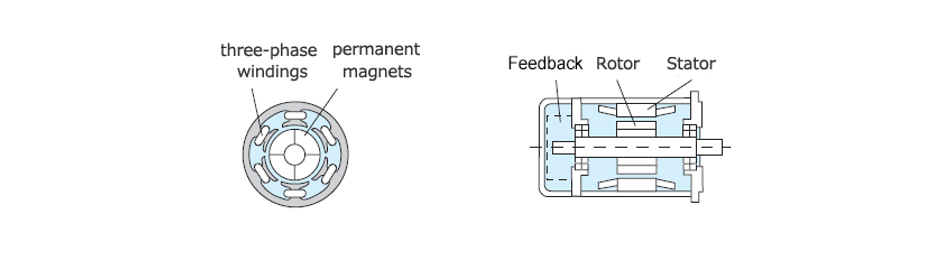
伺服电机电流
三相交流电流用于给伺服电机的磁性线圈通电。
随着定子中电流的变化,三相的磁场也发生变化;导致转子的永磁体与相应的相对准。
其他需要知道的事情
1.增加电流会增加电机扭矩。
2.电流频率越高,电机旋转越快。
3.伺服监控和调节电机电流,以实现更精确的扭矩控制。
4.正确的电流控制需要电机反馈。
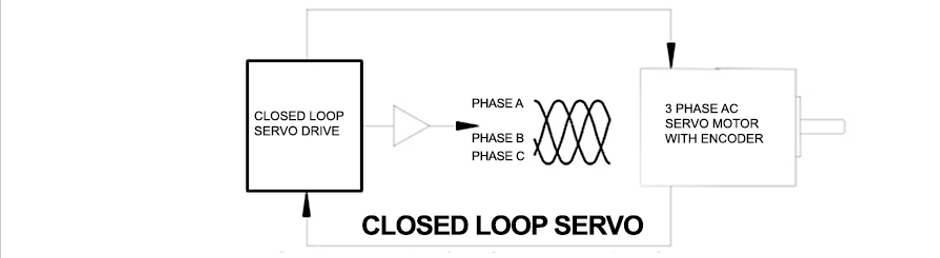
伺服基础概述
三相交流电流产生磁场。这是一个闭环系统,持续监控相对于指令位置的位置,并相应调整电流。零速度保持扭矩所需的电机制动器。
![]() 优势
优势
闭环控制
更高速度下的更高扭矩
降低电机发热
可变负载系统的更好选择
![]() 不足之处
不足之处
更复杂的控制–需要调谐
需要位置反馈
更高的整体系统成本
有趣的伺服事实
相机的自动对焦使用相机内置的精确伺服电机来校正镜头的位置,以锐化失焦图像。

步进或伺服?:选择电机
选择正确的电机
启动运动应用时,您是根据设计标准还是习惯选择电机?你选择伺服系统是因为它是你经常使用的吗?您是否只为简单的应用选择步进机?
本节将帮助您理解您的问题应该要求找到最适合该应用的电机。
 要问的问题
要问的问题
1.我需要移动的负载是多少?
2.我需要以什么速度跑步?
3.在整个运动过程中,我的负荷会发生变化吗?
4.我需要什么特殊功能吗,比如保持扭矩或扭矩限制?
5.我的预算是多少?
6.哪种电机最适合我的应用?
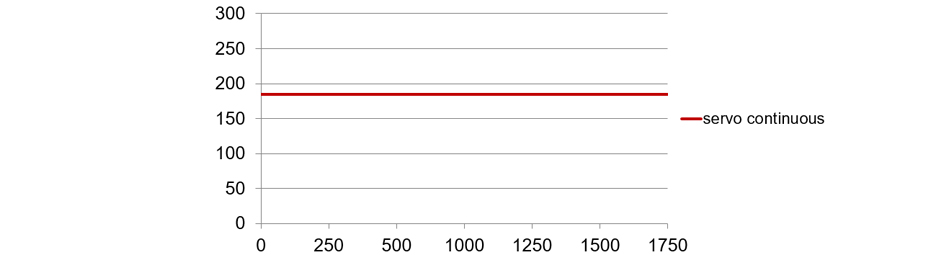
1.我需要移动的负载是多少?(扭矩)
当我们为某个应用选择电机时,我们需要知道电机可以提供多大的扭矩。为此,我们使用电机扭矩曲线。这里是一个典型的伺服电机扭矩曲线。
2.我需要以什么速度跑步?(扭矩+速度)
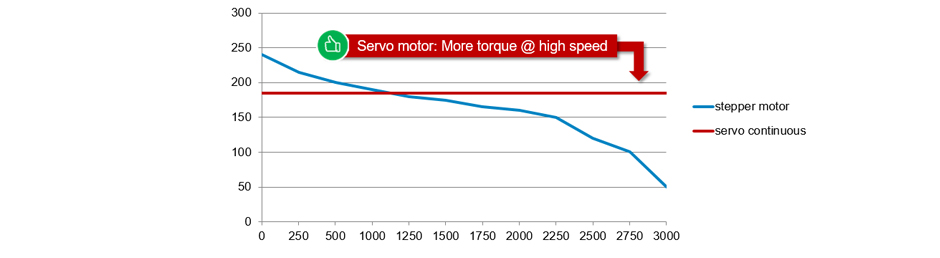
人们通常认为伺服电机的性能优于同等尺寸的步进电机。但事实往往并非如此。这是一个与伺服扭矩曲线相当的步进电机扭矩曲线。
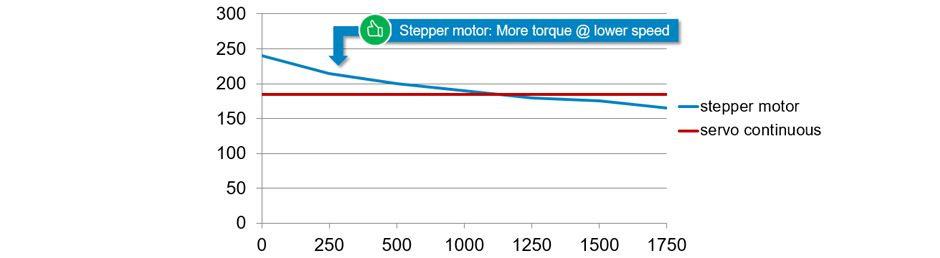
在高速时,步进电机扭矩接近零,而伺服电机在整个速度范围内提供一致的扭矩。
3.在整个运动过程中,我的负荷会发生变化吗?
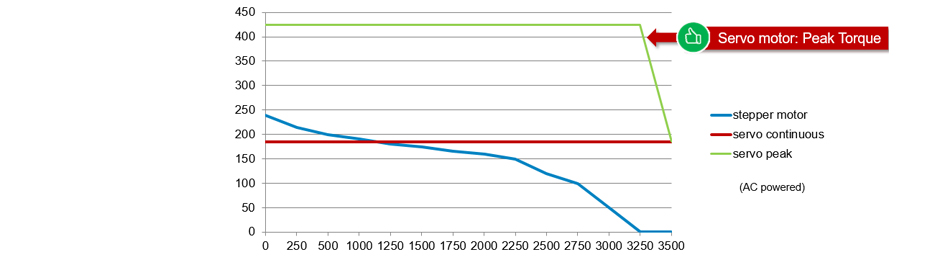
伺服电机具有在短时间内提供峰值扭矩的额外能力,以克服负载变化和较高的电机加速度。
4.特殊功能:保持扭矩
当绕组通电时,步进电机可以在静止时提供全部扭矩,当转子不旋转时,保持负载不受外力影响保持扭矩。这一特性使步进电机成为需要将负载保持在适当位置的情况下的良好选择。

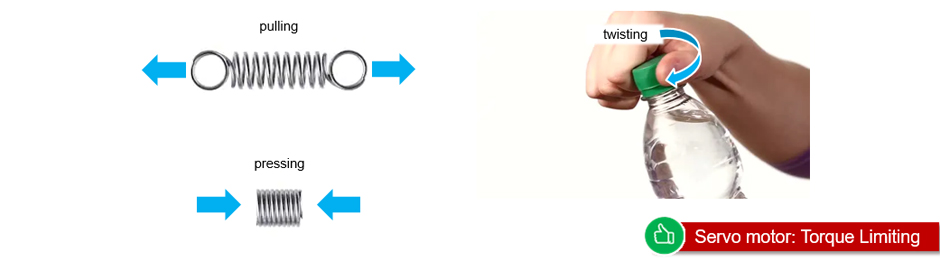
4.特殊功能:扭矩限制
伺服电机可以通过精确监控提供给电机的电流来控制电机扭矩,并对其进行限制,从而不会超过特定的扭矩值扭矩限制。凭借扭矩控制的优势,可以实现许多需要对按压、拉动和扭转运动进行精确力控制的应用。
5.我的预算是什么:步进电机成本
步进电机通常不需要反馈,使用较便宜的磁铁,并且很少集成齿轮箱。由于极数高且能够产生保持扭矩,它们在零速时消耗的功率更低。因此,步进电机通常比类似的伺服电机便宜。

5.我的预算是什么:伺服电机成本
伺服电机需要反馈,使用更昂贵的磁铁,并且通常包含齿轮箱。它们在零速度下也消耗更多的能量。因此,伺服电机通常比可比的步进电机更贵。

6.哪种电机最适合我的应用?
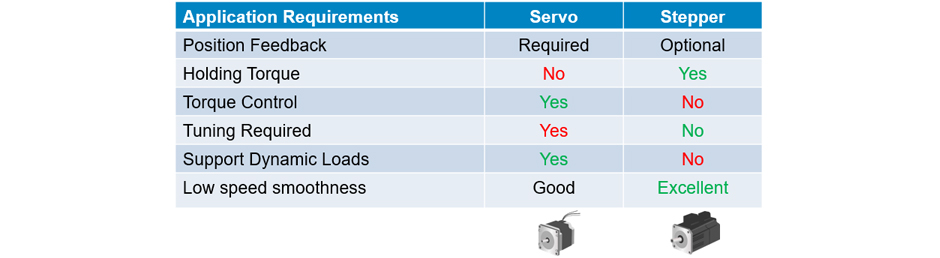
比较步进电机和伺服电机时,电机的控制方式有很大不同。步进机是开环系统,而伺服机是闭环系统。审查您的应用程序需求,以确定一种控制方法是否提供了区别于其他方法的功能。
考虑应用要求时,有几个参数需要考虑,下面的图表提供了一个很好的起点,有助于指导设计人员采用更合适的技术。
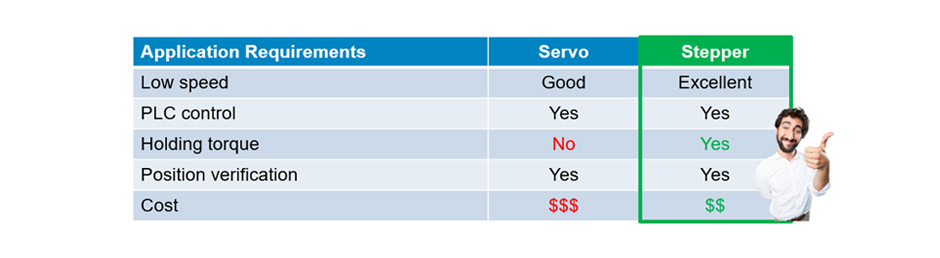
何时选择步进解决方案
![]() 当您的应用程序满足这些要求时,请考虑使用步进器。
当您的应用程序满足这些要求时,请考虑使用步进器。
![]() 高扭矩、低速
高扭矩、低速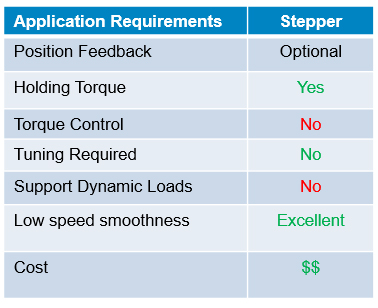
![]() 短暂、快速、重复的动作
短暂、快速、重复的动作
![]() 需要简单的控制
需要简单的控制
![]() 低速、高精度
低速、高精度
![]() 步进器的优势
步进器的优势
![]() 坚固的结构
坚固的结构
![]() 高可靠性意味着无需维护
高可靠性意味着无需维护
![]() 不需要系统调整
不需要系统调整
![]() 低系统成本
低系统成本
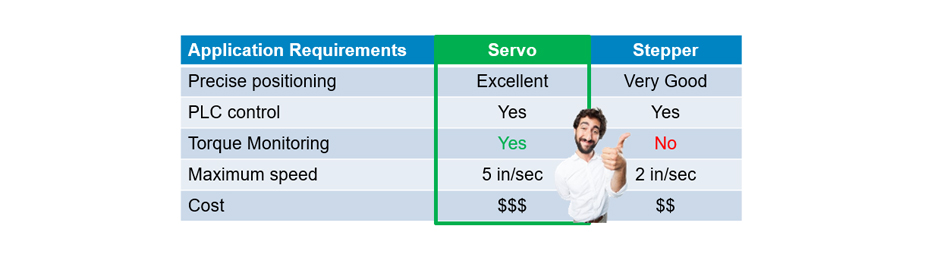
何时选择伺服解决方案
![]() 当您的应用满足这些要求时,请考虑使用伺服系统。
当您的应用满足这些要求时,请考虑使用伺服系统。
![]() 需要高速度
需要高速度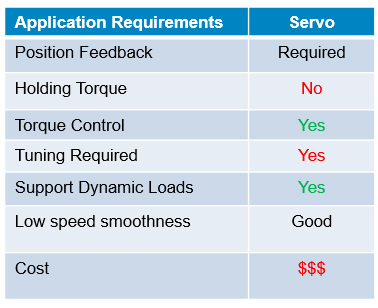
![]() 动态运动轮廓
动态运动轮廓
![]() 控制施加的力
控制施加的力
![]() 伺服系统的优势
伺服系统的优势
![]() 扭矩控制
扭矩控制
![]() 可以执行复杂的动作命令
可以执行复杂的动作命令
![]() 可以根据负载变化进行调整
可以根据负载变化进行调整
![]() 更低的功耗
更低的功耗
应用示例
步进机应用:设置轴
自动滚轮调节
具体情况:制造商正在寻求自动滚筒设置。
目标是:减少转换时间,提高不同生产设置之间的可重复性。
应用要求:
![]() 集成到现有的PLC控制中
集成到现有的PLC控制中
![]() 不到1分钟的周期时间
不到1分钟的周期时间
![]() 按需进行微调
按需进行微调
![]() 监视器位置
监视器位置
![]() 需要保持静止状态
需要保持静止状态
解决方案
步进电机更好的低速平滑度和
静止时保持扭矩使步进器
更好的选择。
伺服应用:动态扭矩控制
瓶子封盖机
具体情况:灌装和装瓶生产线的OEM制造商需要一个线性和旋转致动器作为封盖操作更新的一部分。
目标是:准确放置瓶盖并报告任何丢失或误用的瓶盖。
应用要求:
![]() 集成到现有的PLC控制中
集成到现有的PLC控制中
![]() 非常高的吞吐量
非常高的吞吐量
![]() 扭矩极限上限
扭矩极限上限
![]() 多种产品
多种产品
解决方案
伺服的闭环控制允许更好的
监控电机位置和电流控制。
伺服系统的扭矩限制为系统提供了
能够准确地将瓶盖安装到正确的瓶盖上
关于扭矩。
AMCI集成运动解决方案
电机+驱动+控制器
AMCI的集成电机产品系列通过将电机、驱动器和控制器集成在一个包装中提供了一个完整的解决方案,使安装变得尽可能简单。

关键术语
闭环:测量输出并与输入进行比较的系统。然后调整输出以达到所需条件。在运动系统中,速度或位置(或两者)传感器用于通过与所需参数进行比较来产生校正信号
保持扭矩:在不导致电机持续旋转的情况下,可以施加到停止的通电电机上的最大外力或扭矩。
微步进:一种控制技术,可使步进电机绕组中的电流成比例,以提供磁极之间的中间位置。
开环:指不使用外部传感器来提供速度或位置校正信号的运动系统。
额定转矩:电机在给定速度下产生扭矩的能力。这是电机能够传递给负载的最大扭矩,通常用扭矩/速度曲线来表示。
伺服系统:由若干设备组成的系统,这些设备持续监控实际信息,将这些值与预期结果进行比较,并进行必要的校正以最小化差异。
步进角:收到单步指令时轴旋转的角度。对于标准两相步进电机,当用全步进驱动控制时,步进角为1.8度(200步/圈)。